X-Plane12でジェネアビの機体を飛ばす(後半) [X-Plane]
Cirrus SR22での羽田から成田までのフライト、今回は巡航から着陸までを行っていきます。


巡航
巡航高度の7000FTに到達。FUEL PUMPをOFF。パワーを少し絞って75%にセットすると、速度は160KTに落ち着きました。

PFDには、次のウェイポイントであるOJT(御宿)まで15.6NMと表示されています
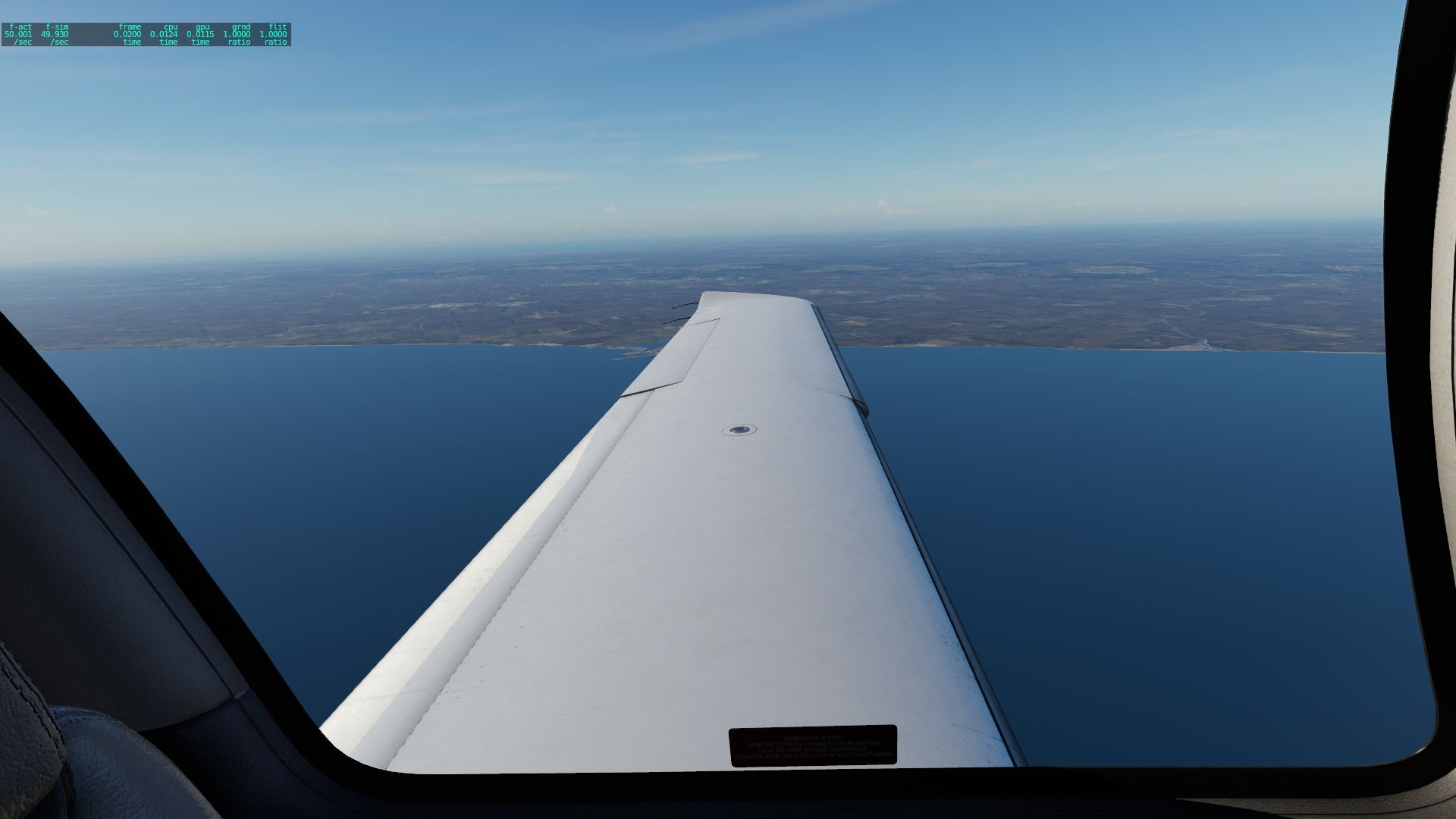
前方に、九十九里の海岸線が見えてきました。低高度だとMSFS2020には敵いませんが、このくらいの高度から見える遠景はX-Plane12の方が自然な感じがします。

御宿上空で左旋回し、次のウェイポイントであるGIINAに向かいます。X-PlaneのG1000は優秀で、きれいにND上のルートをトレースしていきます。

降下・アプローチ
御宿を過ぎましたので、降下とアプローチの準備をします。今回は、成田へILS RWY 34Lでアプローチしますので、最初の会合ポイントであるGIINAへ向かいつつ4000FTまで降下を行っていきます。
巡航高度の7000FTに到達。FUEL PUMPをOFF。パワーを少し絞って75%にセットすると、速度は160KTに落ち着きました。

PFDには、次のウェイポイントであるOJT(御宿)まで15.6NMと表示されています
前方に、九十九里の海岸線が見えてきました。低高度だとMSFS2020には敵いませんが、このくらいの高度から見える遠景はX-Plane12の方が自然な感じがします。

御宿上空で左旋回し、次のウェイポイントであるGIINAに向かいます。X-PlaneのG1000は優秀で、きれいにND上のルートをトレースしていきます。

降下・アプローチ
御宿を過ぎましたので、降下とアプローチの準備をします。今回は、成田へILS RWY 34Lでアプローチしますので、最初の会合ポイントであるGIINAへ向かいつつ4000FTまで降下を行っていきます。
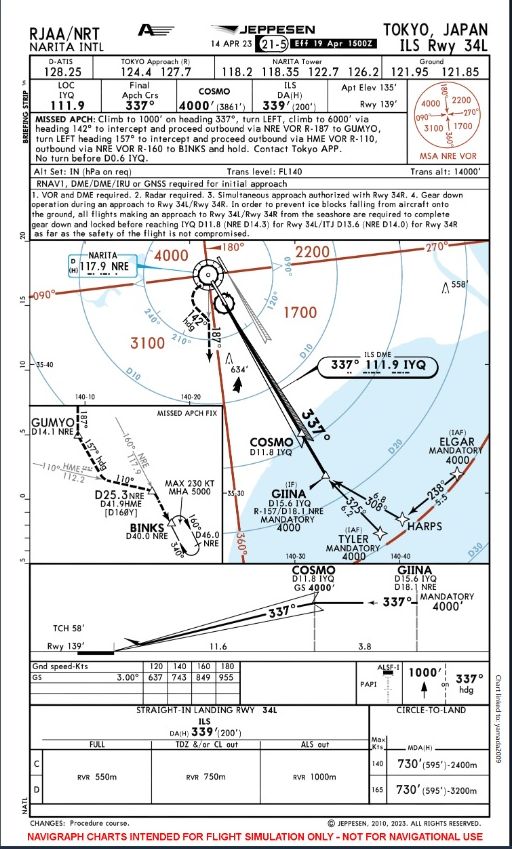
RJAA ILS RWY34Lアプローチチャート
最初に、FMSのPROCEDURESメニューから「ACTIVATE APPROACH」を選択して、FMSをアプローチモードにします。

続いて、VNAVを使用した降下を行うため、その設定を行います。
FMSのFLIGHT PLANページを開き、右下にFMSが計算したTOD(降下開始点)までの時間が表示され、マップ上には降下開始点がT/Dと表示されている事を確認します。
PFDの高度設定を7000FT→4000FTに変更します。
オートパイロットコントローラーの「VNV」ボタンを押すと、PFDのバーチカルモード表示に白字で「VPTH」と表示され、VNAVによる降下がアーム状態になった事が確認できます。


続いて、VNAVを使用した降下を行うため、その設定を行います。
FMSのFLIGHT PLANページを開き、右下にFMSが計算したTOD(降下開始点)までの時間が表示され、マップ上には降下開始点がT/Dと表示されている事を確認します。

PFDの高度設定を7000FT→4000FTに変更します。
オートパイロットコントローラーの「VNV」ボタンを押すと、PFDのバーチカルモード表示に白字で「VPTH」と表示され、VNAVによる降下がアーム状態になった事が確認できます。

その後TODに達すると、バーチカルモードが「VPATH」に変わり、4000FTに向けて自動的に降下が始まります。
この機体はオートスロットルが装備されていませんので、降下開始に合わせてパワーを絞りオーバースピードしないよう注意します。今回は140KTで降下するようパワーを調整しています。
九十九里の海岸線を左手に見ながら、降下を続けます。高度計のQNHを目的空港の値に合わせておきます。



着陸・タキシング
1500FTくらいまで降下したら、FLAPSを一段づつ下げて100%にし、ファイナルアプローチ速度の85KTになるようパワーを調整します。


いよいよ着陸です。

接地後、ラダーで直進状態を維持しながら、スムーズにブレーキを操作して減速します。



複雑な成田の誘導路をタクシーして、何とかリモートゲートの「SPOT421」に到着です。お疲れさまでした。

今回はX-Planeのデフォルト機の完成度の高さを、改めて認識したフライトとなりました。
X-Plane12のSR22は、FMSやオートパイロットの動作は完璧に近く、またマニュアル操縦のフィーリングもとても良好でした。今後も機会が有れば、フライトシミュレーターの話題について書いてみたいと思っています。
この機体はオートスロットルが装備されていませんので、降下開始に合わせてパワーを絞りオーバースピードしないよう注意します。今回は140KTで降下するようパワーを調整しています。

九十九里の海岸線を左手に見ながら、降下を続けます。高度計のQNHを目的空港の値に合わせておきます。
GIINAを4000FTで通過しつつ、ファイナルアプローチコースに向けて左旋回が始まります。
旋回中、ILSのローカライザー電波を受信すると、ラテラルのガイダンスモードが「GPS」から「LOC」に自動的に変わります。
ILSのローカライザーをキャプチャー後、オートパイロットコントローラーの「APR」ボタンを押して、GSをアーム状態にしておきます。
旋回中、ILSのローカライザー電波を受信すると、ラテラルのガイダンスモードが「GPS」から「LOC」に自動的に変わります。
ILSのローカライザーをキャプチャー後、オートパイロットコントローラーの「APR」ボタンを押して、GSをアーム状態にしておきます。

その後、ILSのGSをキャプチャーすると、自動的に3度の降下角で降下が始まります。
パワーを調整して120KTで降下を続けます。
パワーを調整して120KTで降下を続けます。

着陸・タキシング
1500FTくらいまで降下したら、FLAPSを一段づつ下げて100%にし、ファイナルアプローチ速度の85KTになるようパワーを調整します。

着陸前に以下のチェックを行います。
・FUEL PUMP 「BOOST」
・MIXTURE 「FULL RITCH」
・FLAPS 「100%」
・FUEL PUMP 「BOOST」
・MIXTURE 「FULL RITCH」
・FLAPS 「100%」

いよいよ着陸です。
500FTでオートパイロットをOFFにして、マニュアル操縦に切り替えます。
滑走路端を通過したら、パワーを絞ってアイドルにし、機体の沈み具合を見ながらフレアーをかけてメインギヤから接地させます。
滑走路端を通過したら、パワーを絞ってアイドルにし、機体の沈み具合を見ながらフレアーをかけてメインギヤから接地させます。

接地後、ラダーで直進状態を維持しながら、スムーズにブレーキを操作して減速します。

滑走路から誘導路へ出たら一旦停止し、以下の手順を実施します。
・FUEL PUMP 「OFF」
・FLAPS 「UP」
・TRANSPONDER 「STBY」
・LANDING LT 「OFF」
・PITOT HEAT 「OFF」
・FUEL PUMP 「OFF」
・FLAPS 「UP」
・TRANSPONDER 「STBY」
・LANDING LT 「OFF」
・PITOT HEAT 「OFF」


複雑な成田の誘導路をタクシーして、何とかリモートゲートの「SPOT421」に到着です。お疲れさまでした。

今回はX-Planeのデフォルト機の完成度の高さを、改めて認識したフライトとなりました。
X-Plane12のSR22は、FMSやオートパイロットの動作は完璧に近く、またマニュアル操縦のフィーリングもとても良好でした。今後も機会が有れば、フライトシミュレーターの話題について書いてみたいと思っています。




コメント 0