X-Plane12でジェネアビの機体を飛ばす(前半) [X-Plane]
久しぶりのフライトシミュレーターの話題です。
以前、MSFS2020について記事にしましたが、今回は「X-Plane」という、また違った種類のシミュレーションソフトを使ってフライトしてみたいと思います。

X-Plane12 Cirrus SR22

X-Plane12 Cirrus SR22 コックピット

X-Plane12 Cirrus SR22

X-Plane12 Cirrus SR22 コックピット
X-Planeについて
Laminar Researchにより開発されたPC用フライトシミュレーターで、MSFS2020が地表のグラフィックスの緻密さを売りにしているのに対して、X-Planeは、より現実に近い飛行特性や気象条件の再現性に重きを置いて開発されています。
通常版とは異なりますが、X-PlaneのPRO版はハードウェアなどの要件を満たせば、実機の訓練の一部に使用する事がFAA(米連邦航空局)に認められている事からも、その開発方針がうかがえます。
また、多岐のプラットフォームに対応している事もX-Planeの特徴で、Windowsの他、MacやLinuxのマシンでもフライトする事が可能です。
Laminar Researchにより開発されたPC用フライトシミュレーターで、MSFS2020が地表のグラフィックスの緻密さを売りにしているのに対して、X-Planeは、より現実に近い飛行特性や気象条件の再現性に重きを置いて開発されています。
通常版とは異なりますが、X-PlaneのPRO版はハードウェアなどの要件を満たせば、実機の訓練の一部に使用する事がFAA(米連邦航空局)に認められている事からも、その開発方針がうかがえます。
また、多岐のプラットフォームに対応している事もX-Planeの特徴で、Windowsの他、MacやLinuxのマシンでもフライトする事が可能です。
現在はX-Plane12が公開されていますが、グラフィックスやパフォーマンス(FPS)の面でまだ開発途上の部分があり、従来のソフト資産を活かしつつ、安定動作が可能なX-Plane11を使用する人も多いようです。
私も所有するアドオン機体の関係などで、バージョン12への完全移行はせず、11と12を使い分けています。
今回のフライト
使用機材は、X-Plane12のデフォルトの機体の一つであり、セスナ172と並んで非常に飛ばしやすい「Cirrus SR22」を使用します。実機の「Cirrus SR22」は4人乗りの単発レシプロ機で、固定脚ながらその翼型や胴体形状から推測されるように、非常に高性能な機体として知られていています。
今回の飛行ルートは、羽田(RJTT)を離陸して、御宿(OJT)経由で成田(RJAA)に向かいます。Cirrus SR22にはアビオニクスとして、ガーミン社のG1000が装備されていますので、そのVNAVを含めたナビゲーション機能や、オートパイロットを活用してフライトしてみたいと思います。
フライトの準備
1.ラダーペダルの設定
今回使用するSR-22は、ラダーと連動するノーズギヤステアリングが無く、地上走行時の方向転換は左右主脚のブレーキの差動で行います。具体的には、曲がりたい方向のブレーキべダルを僅かに踏んで(タッピング)方向を変えます。
私の場合、ラダーペダルにはCH社の「PRO PEDALS」を使用しているのですが、実機と違いブレーキ反力が無いため、ブレーキによるステアリングはかなり難しい操作になってしまいました。

私の使用しているCH PRO PEDALS
そこで、X-Plane側のジョイスティック設定で、左右ブレーキの動作カーブを下図のように、軽く踏んだ時にブレーキの効きがマイルドになるよう調整を行い、コントロール性の改善を行いました。
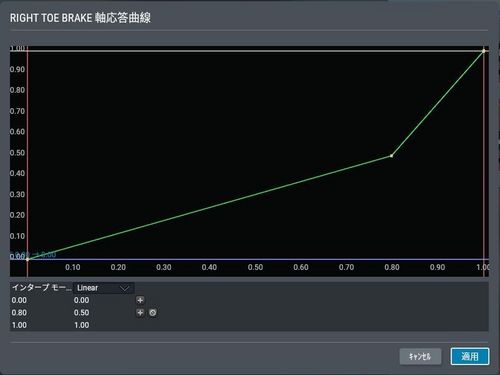
そこで、X-Plane側のジョイスティック設定で、左右ブレーキの動作カーブを下図のように、軽く踏んだ時にブレーキの効きがマイルドになるよう調整を行い、コントロール性の改善を行いました。
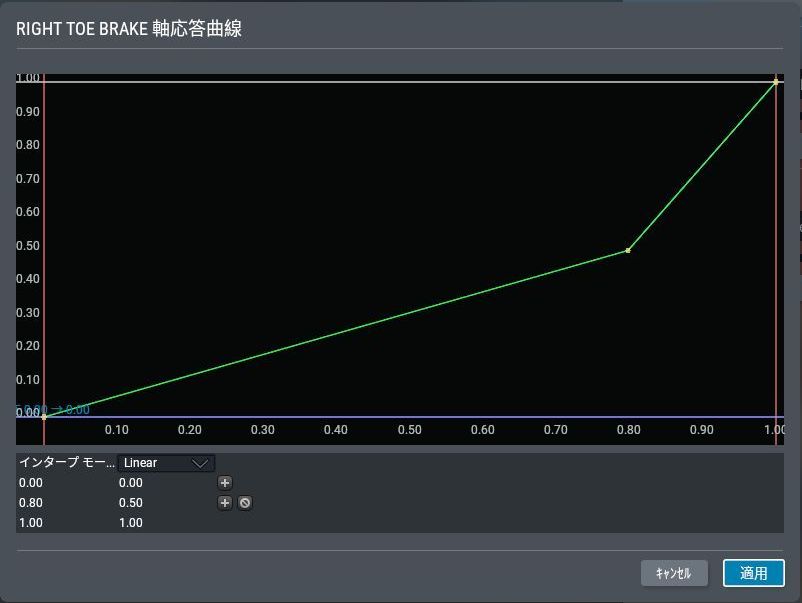
調整後のブレーキの動作カーブ
2.オートパイロット・コントローラーの接続
大型機の場合、オートパイロットのコントローラーはグレアシールド付近にあり、フライトシミュレーターの場合でも、操作時に視点移動が不要で、操作は比較的容易です。
2.オートパイロット・コントローラーの接続
大型機の場合、オートパイロットのコントローラーはグレアシールド付近にあり、フライトシミュレーターの場合でも、操作時に視点移動が不要で、操作は比較的容易です。
一方で、小型機ではペデスタル付近に配置される事が多く、操作時に前方視点から下方に視点を切り替える必要があり、一人で操縦するフライトシムにおいては、操作性が悪くなってしまいます。

SR22のオートパイロット・コントローラー。 メインパネルとペデスタルの中間に配置されています。
その点を改善するため、ハードウェアのコントローラーを使用します。
下の画像は、マイコンボードと「MobiFlight」というフリーウェアの接続ソフトを使用して自作したものです。
シンプルな構成ですが、4つのロータリーエンコーダと10個のスイッチに任意の機能が割り当て可能で、操縦しながらのオートパイロットの操作性が格段に向上しました。

SR22のオートパイロット・コントローラー。 メインパネルとペデスタルの中間に配置されています。
その点を改善するため、ハードウェアのコントローラーを使用します。
下の画像は、マイコンボードと「MobiFlight」というフリーウェアの接続ソフトを使用して自作したものです。
シンプルな構成ですが、4つのロータリーエンコーダと10個のスイッチに任意の機能が割り当て可能で、操縦しながらのオートパイロットの操作性が格段に向上しました。

自作のオートパイロット・コントローラー。エアバス用に製作したものですが、プロファイルを切り替えることで、ボーイングや、小型機用に使用可能です。小型機では、SPDのコントロールノブをCOURCE SELECT用に使用しています。
3.フライトプランの入力
ガーミンG1000は、GPSによるナビゲーションが可能ですので、今回飛行するルートを入力します。
フライトプランは RJTT(羽田) RW05 → OJT(御宿) → GIINA → RJAA(成田) と入力。

羽田からのSID(標準計器出発経路)は、LAXAS3を選択して、LOCUPから先を削除し、LOCUP → OJT と結んでいます。尚、巡航高度は7000FTをセットしています。

成田のアプローチは、RJAA ILS34Lを選択しています。 OJTからGIINAに向かう際に、アプローチモードをアクティブにします。

離陸・上昇
シミュレーションフライトの開始は、スポットにてCold Ship状態から開始する人が多いと思いますが、私の場合は、時間短縮のためRunway上にて、エンジンスタートした状態から開始しています。
今回は羽田空港のRunway 05上からスタートしていますので、離陸前の手順を素早く済ませて離陸します。
最初にPFDのセットを行います。
最初にPFDのセットを行います。
QNHと巡航高度(7000FT)をセットし、ヘディングバグをRunwayヘディングに合わせます。私の場合は、離陸時にFDをリファレンスとして使用しますので、FDをONにし、ラテラルモードを「GPS」、バーチカルモードは「PIT」を選択し、イニシャルピッチとして7度をセットしておきます。

以下の手順を実施します。
・TRANSPONDER 「ALT」
・LANDING LT 「ON」
・PITOT HEAT 「ON」
・FLAPS 「50%」
・MIXTURE 「FULL RITCH」
・FUEL PUMP 「BOOST」
・ELEVATOR TRIM「SET」

以下の手順を実施します。
・TRANSPONDER 「ALT」
・LANDING LT 「ON」
・PITOT HEAT 「ON」
・FLAPS 「50%」
・MIXTURE 「FULL RITCH」
・FUEL PUMP 「BOOST」
・ELEVATOR TRIM「SET」

パーキングブレーキをリリースし、スロットルをFULL FORWARDにして離陸滑走を開始します。
パワーを入れると機首が左へ偏向しようとしますので、右ラダーをしっかり踏んでセンターをキープします。

80KTでゆっくりエレベーターを引いて離陸し、FDのコマンドにピッチを合わせます。
90KTまで加速したら、FLAPSをUPにします。

その後、120KTまで加速したら、FDのバーチカルモードを「FLC」に切り替え、オートパイロットをONにします。

GPSのガイダンスに従い、オートパイロットで順調に飛行しています。LOCUPに向け右旋回中です。

右旋回を終えると、右側に先ほど離陸した羽田空港が見えてきます。

巡航高度の7000FTが近づいてきました。高度の上昇に伴い、MIXTURE(エンジンへ送る混合気の濃さ)の調整を行います。EGT(排気ガス温度)を参照しながらレバーをゆっくり引いて、最も温度が高くなるポイントから少しだけ戻した(濃くなる)位置にセットします。

少し長くなってしまいましたので、巡航から着陸までは次回にしたいと思います。
後半に続く




コメント 0