オートパイロットでヘリコプターを飛ばす [X-Plane]
今回はオートパイロットを使ったヘリコプターのフライトをしてみたいと思います。機体は、オートホバーも可能な4軸のFDシステムを装備した、X-Rotors製のAW139を使用します。


ヘリコプターのオートパイロットについて
ヘリコプターのオートパイロットは、空力的に不安定なヘリの特性を改善するため、機体の開発とセットで開発されることが多く、中型機以上では機体の操縦系統の一部として標準装着される事が多い装備です。
因みに標準装着されるオートパイロットはとてもシンプルで、以下の2つのモードを持っています。
・SASモード(安定性増大機能)
・ATTモード(姿勢維持機能)
また、標準のオートパイロットは非常にシンプルであるため、ヘリコプターメーカーでは、機能を追加するFDシステムをオプションとして準備しています。FDシステムを追加装備する事により、HDG NAV ALT VS APR ... などの飛行モードをオートパイロットにカップリングして、多彩なオートフライトを可能としています。
尚、オートパイロットが標準装着された機体は、今回のAW139もそうですが、基本的には常にオートパイロットONの状態(SAS or ATT)で飛行するように作られていて、非常に安定したフライトを可能にしています。

セッティング
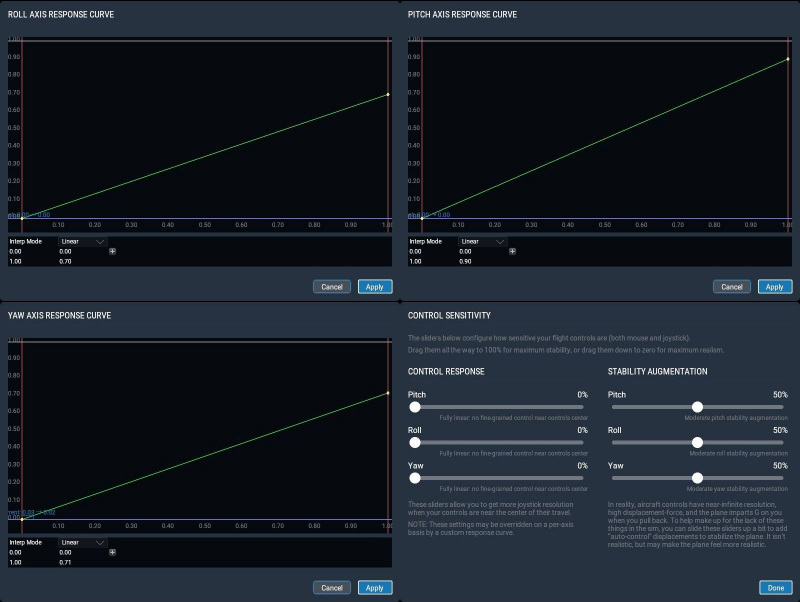
コントロールに使用する各デバイスのセッティング状態は下図のようになりました。
尚、CONTROL SENSITIVITYのSTABILITY AUGMENTATIONは、デフォルトで50%に設定されているようで、変更できませんでした。
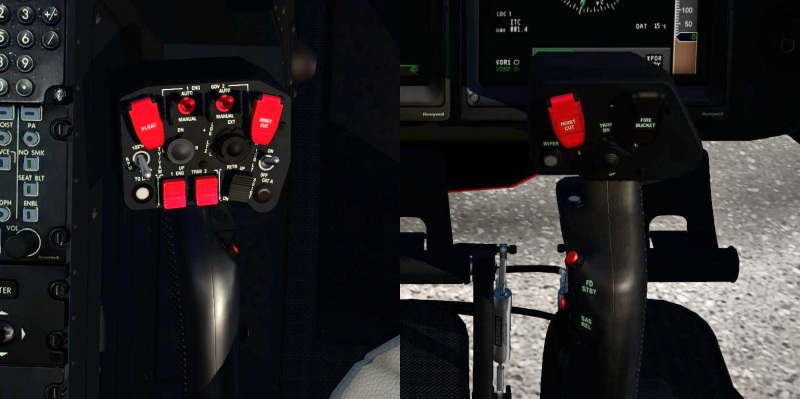
実機のサイクリックスティック及び、コレクティブピッチレバーには、以下のスイッチが配置されています。
オートパイロットをスムーズに操作するため、手持ちのジョイスティック及び、スロットルにも同様の割り当てを行います。

[サイクリックスティック]
・BEEP TRIM switch (DN/UP, L/R, PRESS-HOV)
・FTR(cyclic force trim release)
・FD STBY
・SAS REL
[コレクティブピッチレバー]
・BEEP CLTV/YAW switch (DN/UP, L/R)
・FTR(collective force trim release)
・GA
オートパイロットをスムーズに操作するため、手持ちのジョイスティック及び、スロットルにも同様の割り当てを行います。
[サイクリックスティック]
・BEEP TRIM switch (DN/UP, L/R, PRESS-HOV)
・FTR(cyclic force trim release)
・FD STBY
・SAS REL
[コレクティブピッチレバー]
・BEEP CLTV/YAW switch (DN/UP, L/R)
・FTR(collective force trim release)
・GA
フライトの準備
※以下の手順はフライトシミュレーション用であり、実機の手順とは全く異なっている事をご了承ください。
RJTT SPOT 305にて、エンジンスタートした状態から開始します。

MCDUへフライトプランの入力を行います。3DパネルのMCDUは、ボタンの一部が省略されていて入力しづらいため、ポップアップ画面より入力しています。因みにMCDUは、PRIMUS EPIC用のカスタム品ではなくX-PLANEの標準品です。

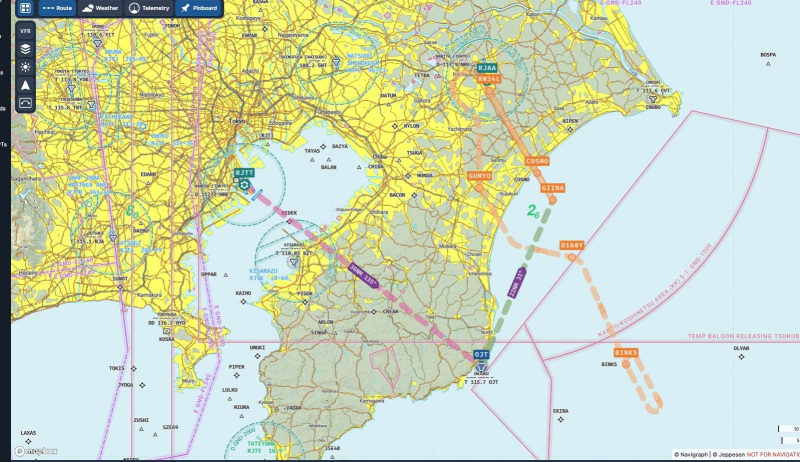
ルートは私がよくテストフライトで使用する RJTT→OJT→GIINA→RJAA RWY34L を入力しています。巡航高度は5000ftをセットしています。
PFDのセットを行います。
QNH、REF ALTITUDE(5000)、HEADING BUG(157)、NAV SOURCES(FMS2)
LOC1 COURCE(337)、NAV1 FRQ(111.9)

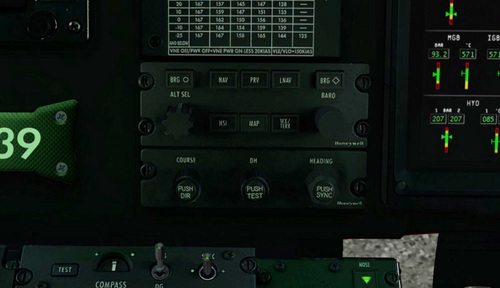
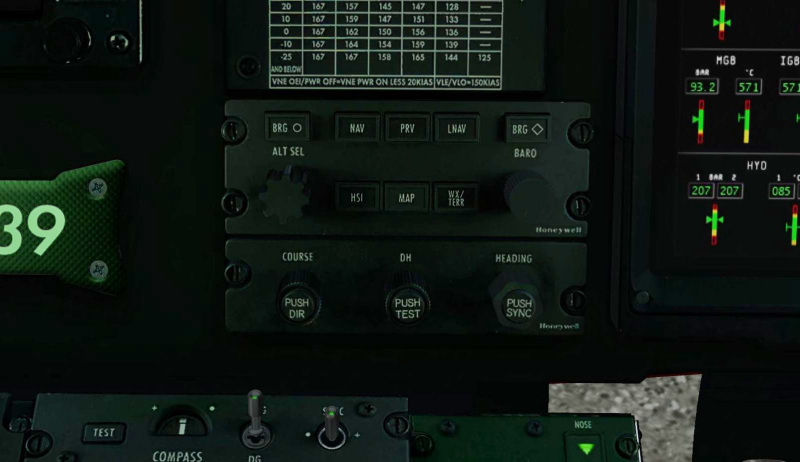
PFD周りの設定はMDF左側にある、これらのパネルで行います。
「DISPLAY CONTROLLER」(上側)
「REMOTE INSTRUMENT CONTROLLER」(下側)
オートパイロットの操作はペデスタルにある、これらのパネルから行います。
「MISC CONTROL PANEL」(上側)--- FORCE TRIM等のスイッチ
「GUIDANCE CONTROLLER」(中央)--- FDのモード選択
「AUTOPILOT CONTROLLER」(下側)--- オートパイロットのON/OFF、モード切替

TAXING
RWY16Lへ向けてタキシングを行います。
・NR/NF --- 100%
※以下の手順はフライトシミュレーション用であり、実機の手順とは全く異なっている事をご了承ください。
RJTT SPOT 305にて、エンジンスタートした状態から開始します。

MCDUへフライトプランの入力を行います。3DパネルのMCDUは、ボタンの一部が省略されていて入力しづらいため、ポップアップ画面より入力しています。因みにMCDUは、PRIMUS EPIC用のカスタム品ではなくX-PLANEの標準品です。

ルートは私がよくテストフライトで使用する RJTT→OJT→GIINA→RJAA RWY34L を入力しています。巡航高度は5000ftをセットしています。
PFDのセットを行います。
QNH、REF ALTITUDE(5000)、HEADING BUG(157)、NAV SOURCES(FMS2)
LOC1 COURCE(337)、NAV1 FRQ(111.9)

PFD周りの設定はMDF左側にある、これらのパネルで行います。
「DISPLAY CONTROLLER」(上側)
「REMOTE INSTRUMENT CONTROLLER」(下側)
オートパイロットの操作はペデスタルにある、これらのパネルから行います。
「MISC CONTROL PANEL」(上側)--- FORCE TRIM等のスイッチ
「GUIDANCE CONTROLLER」(中央)--- FDのモード選択
「AUTOPILOT CONTROLLER」(下側)--- オートパイロットのON/OFF、モード切替

TAXING
RWY16Lへ向けてタキシングを行います。
・NR/NF --- 100%
・NOSE WHEEL LOCK --- UNLK
・PARKING BRAKE --- RELEASED

RWYの手前で以下の手順を行います。
・AFCS --- ENGAGED
・MFD --- PWR PLANT PAGE
・NOSE WHEEL LOCK --- LOCK
・PARKING BRAKE --- RELEASED
・ENG MODE --- BOTH FLT
・ECL --- BOTH FLT
・CAS --- CHECK
・LANDING LT --- ON
TAKE OFF

本機のSASモードにおけるマニュアル操縦は極めて容易ですが、せっかくですので、オートホバリング機能を利用して離陸を行います。(実機では行わないオペレーションです)
・FORCE TRIM --- ON
・CLTV/YAW TRIM --- OFF を確認後、
「HOV 」スイッチをONにすると、PFDのモード表示が「HOV」になり、HSIがHOVモードの表示に変わります。

同時に、機体のピッチが+5度になるまでノーズが上がります。
NOTE:
本機はピッチの基準が+5度となってるようで、離着陸時はこのピッチ角で上昇・降下します。従って、マニュアル操縦時は、+5度を意識すると機体が前後方向に動かず、安定した離着陸ができます。

この状態でコレクティブピッチレバー(以下CPレバーと略)を引くと機体が浮揚するので、レバーの引き上げ量を調整して所望する高度まで上昇させます。この時YAW軸回りに機首が偏向する場合は、適宜ペダルを踏んで機首方位を維持します。

無風であれば、一度オートホバリングに入ると、非常に安定したホバリング状態が維持されます。
(本来のHOVモードはRHTモードを加えた4軸制御ですが、本機はロール、ピッチの2軸モードとなります)

前進飛行に移行します。
・FORCE TRIM --- OFF
・FD STBY --- PUSH でマニュアル操縦(SASモード)に切り替え、前進飛行を開始します。
50ktまで加速したらノーズを上げて上昇飛行に移行し、80ktで上昇を続けます。
LANDING GEARをUPにします。

CLIMB、CRUISE
80ktの上昇姿勢のまま、FORCE TRIMと、CLTV/YAW TRIMを ON にします。
・PARKING BRAKE --- RELEASED

RWYの手前で以下の手順を行います。
・AFCS --- ENGAGED
・MFD --- PWR PLANT PAGE
・NOSE WHEEL LOCK --- LOCK
・PARKING BRAKE --- RELEASED
・ENG MODE --- BOTH FLT
・ECL --- BOTH FLT
・CAS --- CHECK
・LANDING LT --- ON
TAKE OFF

本機のSASモードにおけるマニュアル操縦は極めて容易ですが、せっかくですので、オートホバリング機能を利用して離陸を行います。(実機では行わないオペレーションです)
・FORCE TRIM --- ON
・CLTV/YAW TRIM --- OFF を確認後、
「HOV 」スイッチをONにすると、PFDのモード表示が「HOV」になり、HSIがHOVモードの表示に変わります。

同時に、機体のピッチが+5度になるまでノーズが上がります。
NOTE:
本機はピッチの基準が+5度となってるようで、離着陸時はこのピッチ角で上昇・降下します。従って、マニュアル操縦時は、+5度を意識すると機体が前後方向に動かず、安定した離着陸ができます。

この状態でコレクティブピッチレバー(以下CPレバーと略)を引くと機体が浮揚するので、レバーの引き上げ量を調整して所望する高度まで上昇させます。この時YAW軸回りに機首が偏向する場合は、適宜ペダルを踏んで機首方位を維持します。

無風であれば、一度オートホバリングに入ると、非常に安定したホバリング状態が維持されます。
(本来のHOVモードはRHTモードを加えた4軸制御ですが、本機はロール、ピッチの2軸モードとなります)

前進飛行に移行します。
・FORCE TRIM --- OFF
・FD STBY --- PUSH でマニュアル操縦(SASモード)に切り替え、前進飛行を開始します。
50ktまで加速したらノーズを上げて上昇飛行に移行し、80ktで上昇を続けます。
LANDING GEARをUPにします。

CLIMB、CRUISE
80ktの上昇姿勢のまま、FORCE TRIMと、CLTV/YAW TRIMを ON にします。
下記のモードスイッチ押し、FDをオートパイロットとカップリングします。
・NAVモード --- ON
・ALTAモード --- ON
PFDのモード表示が「ALTA」「LNAV」となって、FMSのルートに沿って上昇しながら飛行を続けます。
所望する上昇率となるよう、BEEP CLTV/YAW switch (DN/UP)でリファレンス値を設定します。また、必要によりCPレバーを操作して、出力(トルク値)を調整します。
NOTE:
本来は「ALTA」を押すと、「IAS」モードも同時にONとなって、速度も制御されるようですが、本機はCPレバー軸の制御が行われないため、「ALTA」モードのみで上昇・降下を行います。

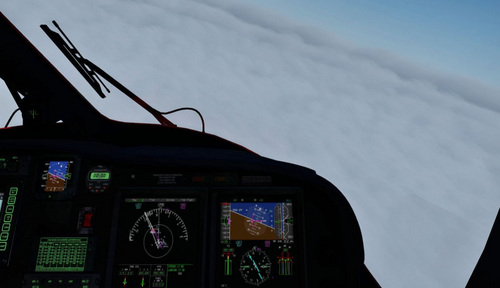
雲上に出て順調に上昇していきます。今回は低視程状態でのアプローチを行います。

巡航高度の5000ftに到達し水平飛行に移行します。PFDのバーチカルモードが「ALTA」から「ALT」に変わります。

順調に飛行しています。最初のWAYPOINTである御宿(OJT)まで15nm。

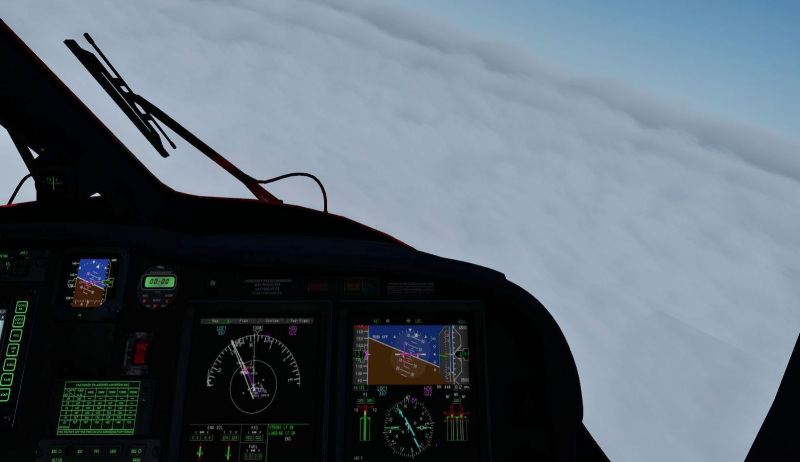
間もなく「OJT」です。成田方面も雲で覆われていて何も見えません。

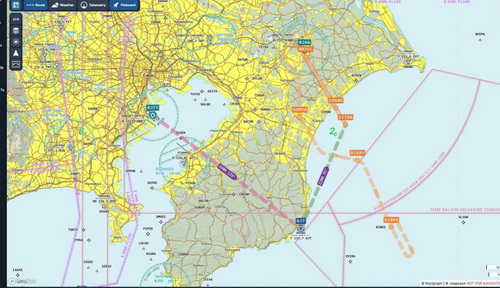
OJT上空。次のコースに向けて左旋回します。

オートパイロットのFDへの追従は良好です。少しバンクの入りが急激な気がしますが、オーバーシュートする事もなく、正確にトレースしていきます。

DESCEND AND APPROACH
5000ftからILSの会合高度である4000ftまで降下します。この操作も「ALTA」モードを使用します。速度がオーバーしないよう、CPレバーを操作して調整します。
目的空港のQNHとMINMUM ALTをPFDにセットします。

4000ftに降下後、ファイナルアプローチコースが近づいてきましたので、「DISPLAY CONTROLLER」の「NAV」スイッチを押して、NAVモードを「LOC」に切り替えます。
加えて「GUIDANCE CONTROLLER」の「APR」を押して、「GS」をアームにしておきます。

ローカライザーをキャプチャーし、左旋回が始まります。
ローカライザーコースに乗りました。GSのRAWインジケーターが降りてきました。

GSをキャプチャーし降下中です。速度が120ktになるよう、CPレバーを操作して調整します。

成田空港の周辺は雲が低く、間もなく雲に入ります。
1500ftまで降下したら、徐々に減速してAGL200ftで80ktまで減速します。
LANDING GEARをDOWNにします。
NOTE:
本機は「DCL(自動減速モード)」が装備されていないため、マニュアルで減速を行っています。

LANDING
ミニマム高度(339ft)近くで、滑走路が視認できました。
・FORCE TRIM --- OFF
・FD STBY --- PUSH でマニュアル操縦(SASモード)に切り替え、進入を継続します。

進入を継続しながら、オートホバリングに移行するため60ktまで減速します。

60ktまで減速後、
・FORCE TRIM --- ON
・HOV SW --- ON にして、「HOV」モードにします。

AIRSPEEDの減少に伴って高度が下がるため、CPレバーを操作して高度を調整します。同時にペダルを操作して機首方位を維持します。

安定したオートホバリング状態になったら、CPレバーを操作してゆっくり降下し、接地します。

TAXI
今回はSPOT502を使用するため、K、M3 経由でタクシーします。

地上誘導員の誘導に従い慎重にSPOT INします。

無事SPOT502に到着しました。お疲れ様でした。

X-Rotors AW139について
外部のモデリングは非常に美しく仕上げられ、どことなく高級感が感じられる機体です。
コックピット内は、実機ではアビオニクスとして、Honeywell社のPRIMUS EPICシステムを搭載していますが、本機でもそれに準じたモデリングが行われています。ただ機能面での再現は完全ではなく、動作しない機能やスイッチが散見されました。
マニュアルフライトは良好で、SASを装備した機体らしく、とても安定していて操縦しやすい機体です。また、操作に対する機体の反応も、僅かなタイムラグを持たせるなど中型機らしい重量感が加味されているように思います。
オートフライトは、FMSによるLNAVや、ILSによるアプローチなどは完全に動作しました。しかしながら、本機の売りである、4軸のフライトディレクショナルシステムは、現在のバージョン(4.01 for X-Plane11)では完全に動作せず、実際には2.5軸程度の動作に感じられました。
尚、X-Rotorsでは、2024年に大幅に改良されたバージョン5.00のリリースを予定しているようですので、それに期待したいところです。
・NAVモード --- ON
・ALTAモード --- ON
PFDのモード表示が「ALTA」「LNAV」となって、FMSのルートに沿って上昇しながら飛行を続けます。
所望する上昇率となるよう、BEEP CLTV/YAW switch (DN/UP)でリファレンス値を設定します。また、必要によりCPレバーを操作して、出力(トルク値)を調整します。
NOTE:
本来は「ALTA」を押すと、「IAS」モードも同時にONとなって、速度も制御されるようですが、本機はCPレバー軸の制御が行われないため、「ALTA」モードのみで上昇・降下を行います。

雲上に出て順調に上昇していきます。今回は低視程状態でのアプローチを行います。

巡航高度の5000ftに到達し水平飛行に移行します。PFDのバーチカルモードが「ALTA」から「ALT」に変わります。

順調に飛行しています。最初のWAYPOINTである御宿(OJT)まで15nm。

間もなく「OJT」です。成田方面も雲で覆われていて何も見えません。

OJT上空。次のコースに向けて左旋回します。

オートパイロットのFDへの追従は良好です。少しバンクの入りが急激な気がしますが、オーバーシュートする事もなく、正確にトレースしていきます。

DESCEND AND APPROACH
5000ftからILSの会合高度である4000ftまで降下します。この操作も「ALTA」モードを使用します。速度がオーバーしないよう、CPレバーを操作して調整します。
目的空港のQNHとMINMUM ALTをPFDにセットします。

4000ftに降下後、ファイナルアプローチコースが近づいてきましたので、「DISPLAY CONTROLLER」の「NAV」スイッチを押して、NAVモードを「LOC」に切り替えます。
加えて「GUIDANCE CONTROLLER」の「APR」を押して、「GS」をアームにしておきます。

ローカライザーをキャプチャーし、左旋回が始まります。
ローカライザーコースに乗りました。GSのRAWインジケーターが降りてきました。

GSをキャプチャーし降下中です。速度が120ktになるよう、CPレバーを操作して調整します。

成田空港の周辺は雲が低く、間もなく雲に入ります。
1500ftまで降下したら、徐々に減速してAGL200ftで80ktまで減速します。
LANDING GEARをDOWNにします。
NOTE:
本機は「DCL(自動減速モード)」が装備されていないため、マニュアルで減速を行っています。

LANDING
ミニマム高度(339ft)近くで、滑走路が視認できました。
・FORCE TRIM --- OFF
・FD STBY --- PUSH でマニュアル操縦(SASモード)に切り替え、進入を継続します。

進入を継続しながら、オートホバリングに移行するため60ktまで減速します。

60ktまで減速後、
・FORCE TRIM --- ON
・HOV SW --- ON にして、「HOV」モードにします。

AIRSPEEDの減少に伴って高度が下がるため、CPレバーを操作して高度を調整します。同時にペダルを操作して機首方位を維持します。

安定したオートホバリング状態になったら、CPレバーを操作してゆっくり降下し、接地します。

TAXI
今回はSPOT502を使用するため、K、M3 経由でタクシーします。

地上誘導員の誘導に従い慎重にSPOT INします。

無事SPOT502に到着しました。お疲れ様でした。

X-Rotors AW139について
外部のモデリングは非常に美しく仕上げられ、どことなく高級感が感じられる機体です。
コックピット内は、実機ではアビオニクスとして、Honeywell社のPRIMUS EPICシステムを搭載していますが、本機でもそれに準じたモデリングが行われています。ただ機能面での再現は完全ではなく、動作しない機能やスイッチが散見されました。
マニュアルフライトは良好で、SASを装備した機体らしく、とても安定していて操縦しやすい機体です。また、操作に対する機体の反応も、僅かなタイムラグを持たせるなど中型機らしい重量感が加味されているように思います。
オートフライトは、FMSによるLNAVや、ILSによるアプローチなどは完全に動作しました。しかしながら、本機の売りである、4軸のフライトディレクショナルシステムは、現在のバージョン(4.01 for X-Plane11)では完全に動作せず、実際には2.5軸程度の動作に感じられました。
尚、X-Rotorsでは、2024年に大幅に改良されたバージョン5.00のリリースを予定しているようですので、それに期待したいところです。




コメント 0